

Research
Discovering Adaptable Symbolic Algorithms from Scratch
AutoML, IROS 2023
Autonomous robots deployed in the real world will need control policies that rapidly adapt to environmental changes. To this end, we propose AutoRobotics-Zero (ARZ), a method based on AutoML-Zero that discovers zero-shot adaptable policies from scratch. In contrast to neural network adaptation policies, where only model parameters are optimized, ARZ can build control algorithms with the full expressive power of a linear register machine. Results confirm our findings that ARZ is significantly more robust to sudden environmental changes and can build simple, interpretable control policies.
Paper / BibTex / Video
AutoML, IROS 2023
Autonomous robots deployed in the real world will need control policies that rapidly adapt to environmental changes. To this end, we propose AutoRobotics-Zero (ARZ), a method based on AutoML-Zero that discovers zero-shot adaptable policies from scratch. In contrast to neural network adaptation policies, where only model parameters are optimized, ARZ can build control algorithms with the full expressive power of a linear register machine. Results confirm our findings that ARZ is significantly more robust to sudden environmental changes and can build simple, interpretable control policies.
Paper / BibTex / Video

MOAZ: A Multi-Objective AutoML-Zero Framework
AutoML, GECCO 2023
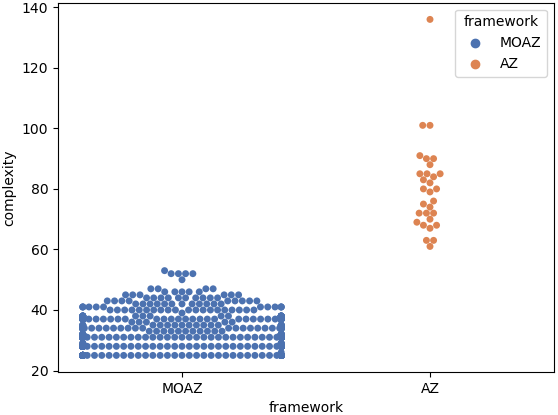
MOAZ is a multi-objective variant of AutoML-Zero that automatically designs machine learning algorithms from scratch and distributes them on a Pareto front by trading off accuracy against the computational complexity of the algorithms. In addition to generating different Pareto-optimal solutions, MOAZ can effectively explore the sparse search space to improve search efficiency. Experimental results on linear regression tasks show MOAZ reduces the median complexity by 87.4% compared to AutoML-Zero while accelerating the median target performance achievement speed by 82%. In addition, our preliminary results on non-linear regression tasks show the potential for further improvements in search accuracy and for reducing the need for human intervention in AutoML.
Paper / BibTex
AutoML, GECCO 2023
MOAZ is a multi-objective variant of AutoML-Zero that automatically designs machine learning algorithms from scratch and distributes them on a Pareto front by trading off accuracy against the computational complexity of the algorithms. In addition to generating different Pareto-optimal solutions, MOAZ can effectively explore the sparse search space to improve search efficiency. Experimental results on linear regression tasks show MOAZ reduces the median complexity by 87.4% compared to AutoML-Zero while accelerating the median target performance achievement speed by 82%. In addition, our preliminary results on non-linear regression tasks show the potential for further improvements in search accuracy and for reducing the need for human intervention in AutoML.
Paper / BibTex
Virtual metrology in long batch processes using machine learning
Virtual Metrology in Manufacturing, Materials and Manufacturing Processes Journal
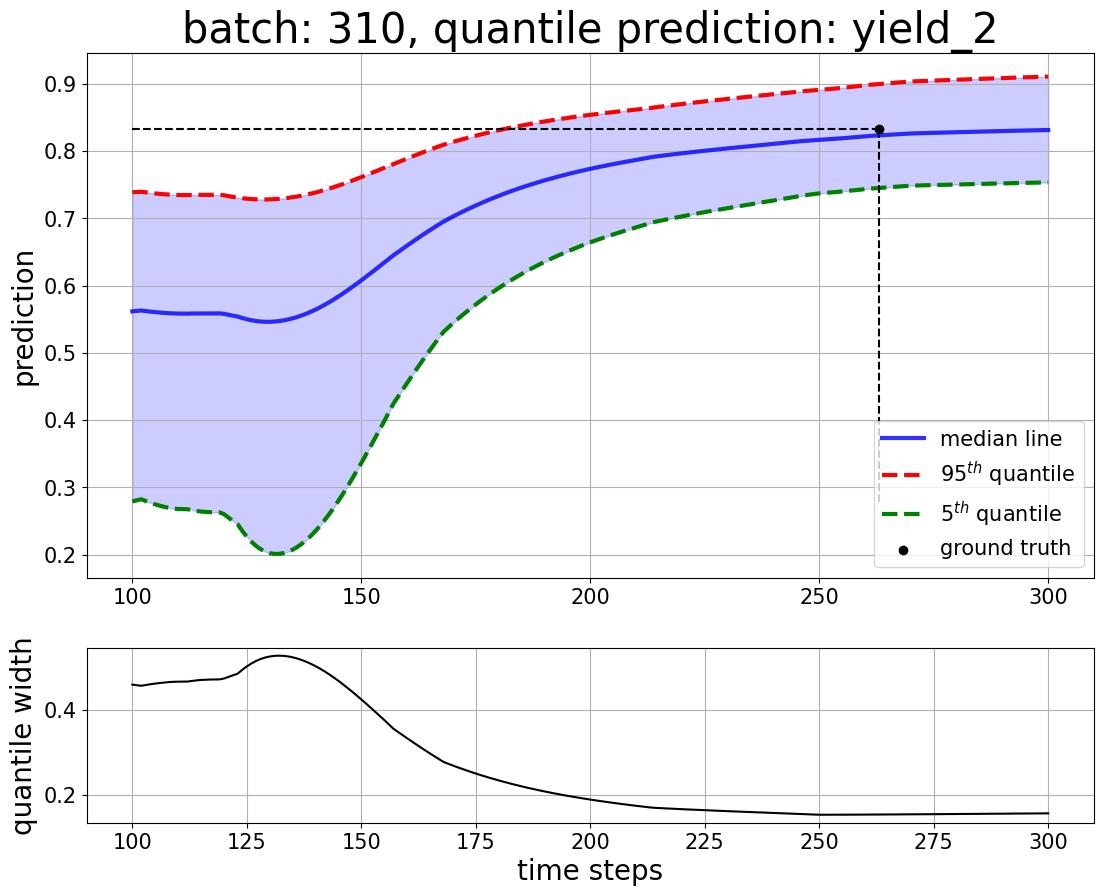
The analysts of long batch processes are often interested in predicting the eventual process outcomes well before the completion of the process so that the process can be terminated in case the predicted outcome is not as desired. Virtual Metrology (VM), a virtual property estimation procedure, has gained importance over the years as a supporting tool to address this problem. In this paper, we have proposed a generalized VM pipeline including a deep-learning model that can be scaled to support high-dimensional input sensors and outputs. The developed model is able to predict the end-results for an industrial problem with less than 10% error after about one-fifth of the total process-time.
Paper / BibTex
Virtual Metrology in Manufacturing, Materials and Manufacturing Processes Journal
The analysts of long batch processes are often interested in predicting the eventual process outcomes well before the completion of the process so that the process can be terminated in case the predicted outcome is not as desired. Virtual Metrology (VM), a virtual property estimation procedure, has gained importance over the years as a supporting tool to address this problem. In this paper, we have proposed a generalized VM pipeline including a deep-learning model that can be scaled to support high-dimensional input sensors and outputs. The developed model is able to predict the end-results for an industrial problem with less than 10% error after about one-fifth of the total process-time.
Paper / BibTex
RegEMO: Sacrificing Pareto-Optimality for Regularity in Multi-objective Problem-Solving
Regularity in Optimization, EMO 2023
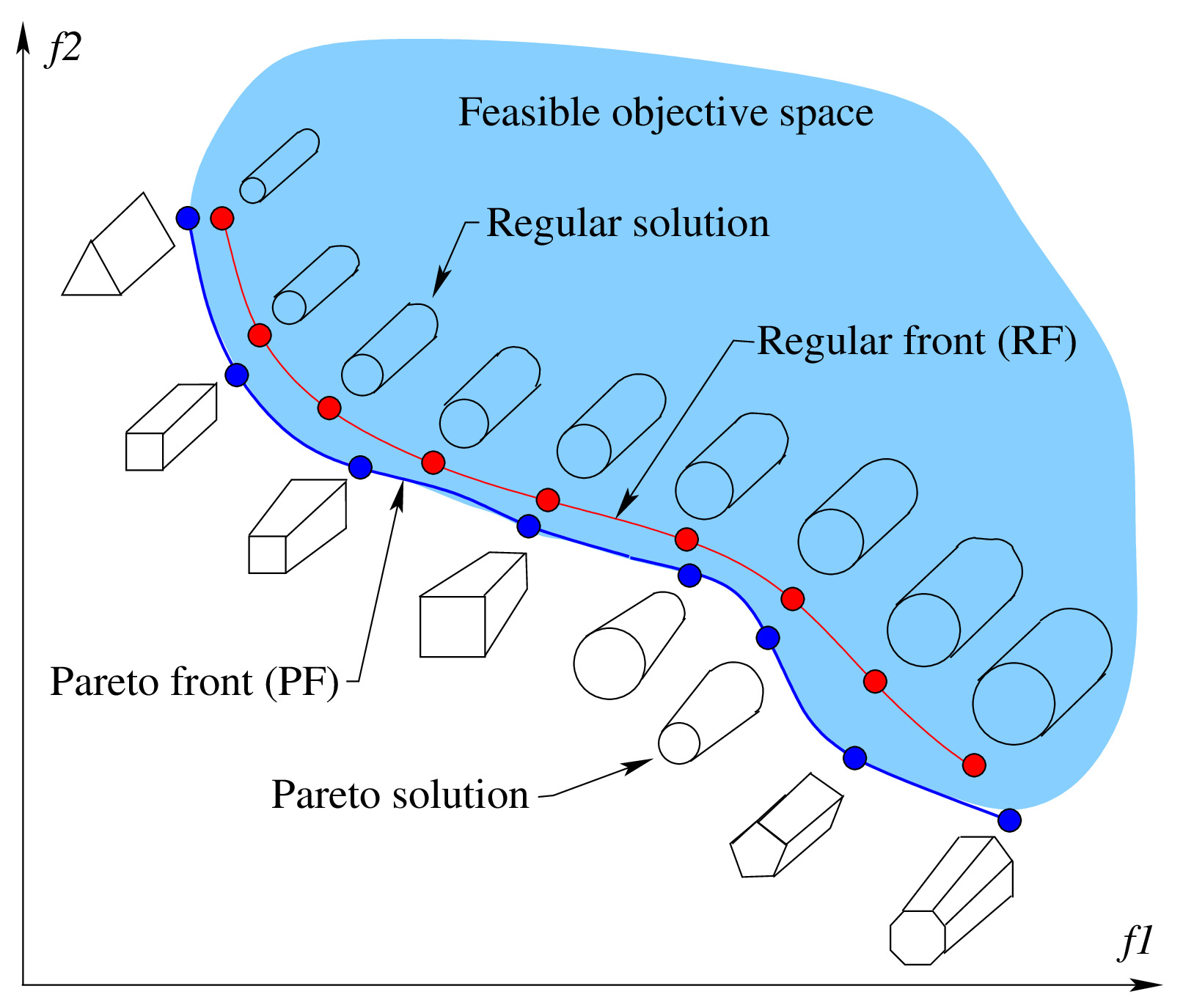
When multiple Pareto-Optimal (PO) solutions are to be considered for different scenarios as platform-based solutions, a common structure in them, if available, is highly desired for easier understanding, standardization, and management purposes. In this paper, we propose a modified optimization methodology to avoid converging to theoretical PO solutions having no common structure and converging to a set of near-Pareto solutions having simplistic common principles with regularity where the common principles are extracted from the PO solutions in an automated fashion. The idea has been successfully applied over more than 16 engineering design problems.
Paper / BibTex
Regularity in Optimization, EMO 2023
When multiple Pareto-Optimal (PO) solutions are to be considered for different scenarios as platform-based solutions, a common structure in them, if available, is highly desired for easier understanding, standardization, and management purposes. In this paper, we propose a modified optimization methodology to avoid converging to theoretical PO solutions having no common structure and converging to a set of near-Pareto solutions having simplistic common principles with regularity where the common principles are extracted from the PO solutions in an automated fashion. The idea has been successfully applied over more than 16 engineering design problems.
Paper / BibTex
Interpretable AI Agent Through Nonlinear Decision Trees for Lane Change Problem
Interpretable AI, SSCI 2021
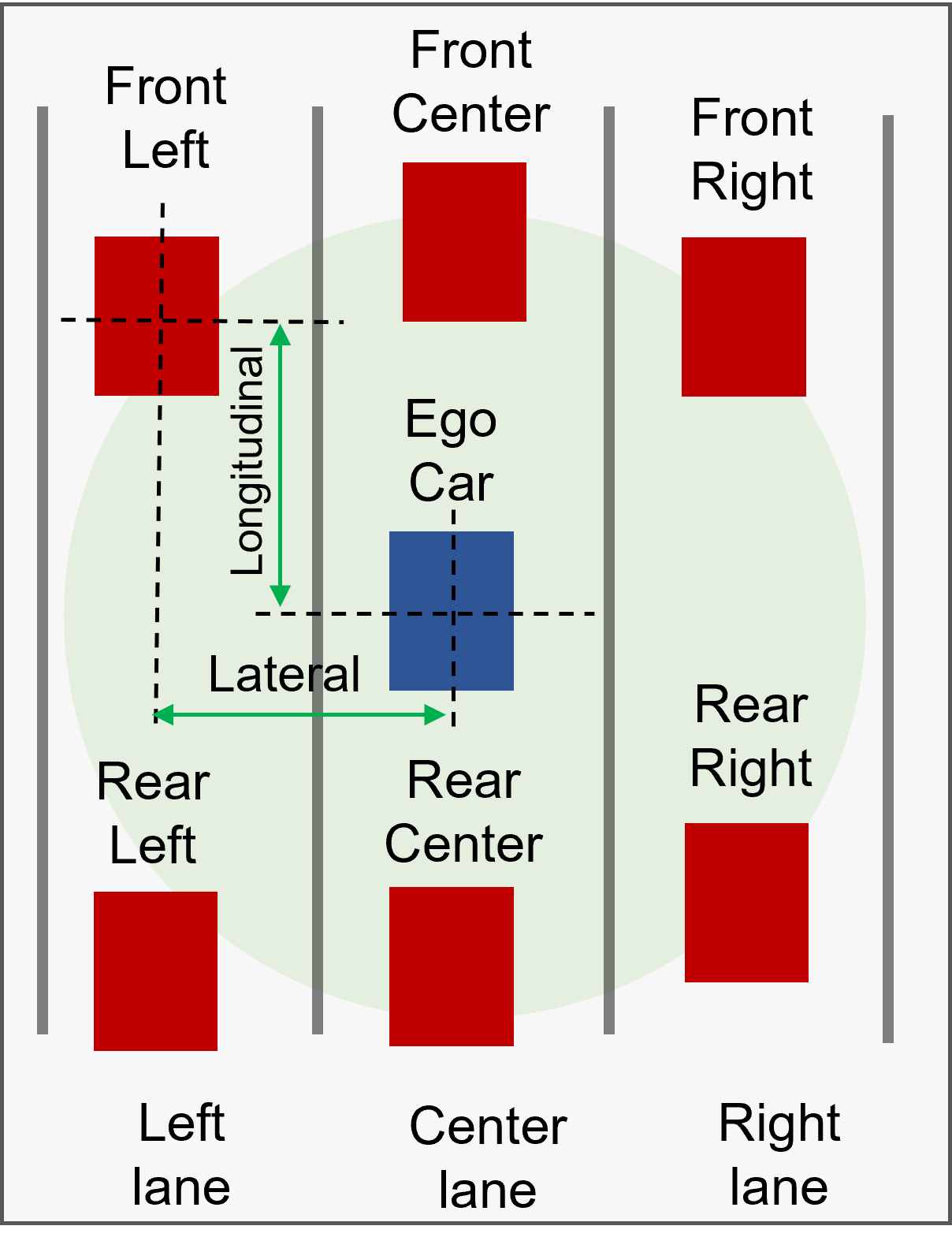
In this paper, we attempt to decode the inner working of a blackbox of DNN/RL controller used for autonomous highway driving. The decisions of the RL agent is represented in the form of a non-linear decision tree (NLDT). A bi-level evolutionary algorithm has been used to form the NLDT structure fitting the state-action mapping of the RL agent for various situations.
Paper / BibTex
Interpretable AI, SSCI 2021
In this paper, we attempt to decode the inner working of a blackbox of DNN/RL controller used for autonomous highway driving. The decisions of the RL agent is represented in the form of a non-linear decision tree (NLDT). A bi-level evolutionary algorithm has been used to form the NLDT structure fitting the state-action mapping of the RL agent for various situations.
Paper / BibTex
© www.ritamguha.com. All Rights Reserved. Designed by HTML Codex